An Open-source Anthropomorphic Robot Hand System: HRI Hand
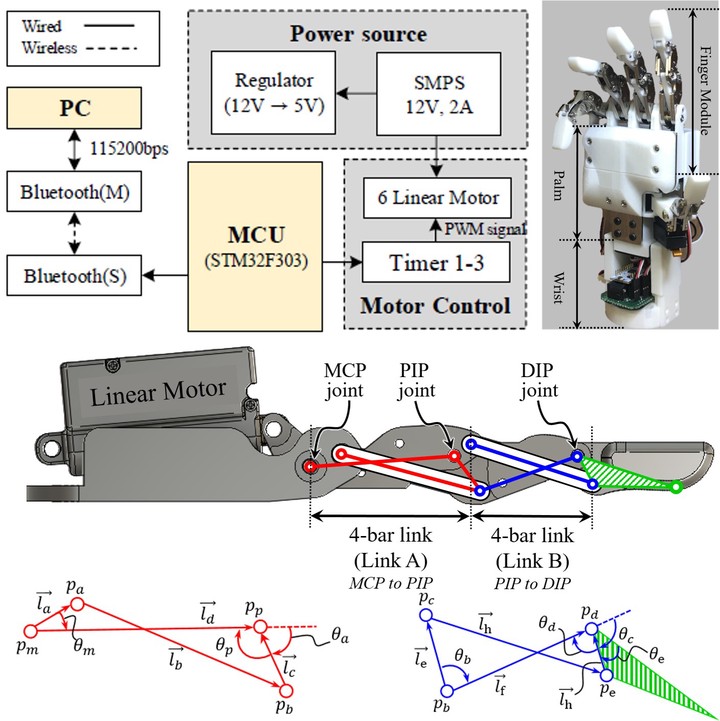
We present an open-source anthropomorphic robot hand system called HRI hand. Our robot hand system was developed with a focus on the end-effector role of the collaborative robot manipulator. HRI hand is a research platform that can be built at a lower price (approximately $500, using only 3D printing) than commercial end-effectors. Moreover, it was designed as a two four-bar linkage for the under-actuated mechanism and provides pre-shaping motion similar to the human hand prior to touching an object. A URDF, python node, and rviz package is also provided to support the Robot Operating System (ROS). All hardware CAD design files and software source codes have been released and can be easily assembled and modified. The system proposed in this paper is developed with a five-finger structure, but each finger is modularized, so it can be developed with end-effectors of various shapes depending on the shape of the palm.
Project Author(s)
Hyeonjun Park; Donghan Kim
Project Links
https://github.com/MrLacuqer/HRI-hand-firmware.git
Project Video
This post was automatically generated by Andre M Chagas