Mouse VR
Harvey Lab miniaturized mouse VR rig for head-fixed virtual navigation and decision-making tasks.
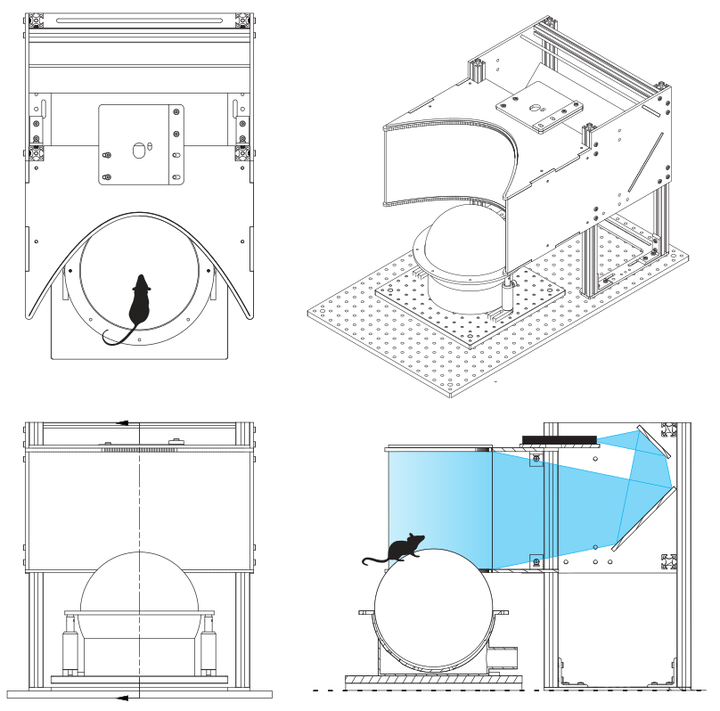
The VR setup is comprised of several independent assemblies:
The screen assembly: a laser projector projects onto a parabolic screen surrounding the mouse. This is the basis for the visual virtual reality.
Ball cup assembly: an air-supported 8" styrofoam ball that the mouse can run on, with associated ball cup, sensors, and electronics
Reward delivery system and lick sensor: lick spout, liquid reward reservoir, solenoid, and associated electronics
Enclosure: A box surrounding the behavioral setup.
Each of these components is independent of the others: i.e. just the screen could be used in combination with a different treadmill and reward delivery system. The electronics for the ball sensors, reward delivery, and lick detection are all mounted on the same PCB. If only one or two of these functions are needed, you do not need to populate the entire PCB.
The screen assembly is designed to be small enough to be mounted within a standard 19" server rack, which could easily fit 3 rigs stacked vertically (or two + monitor and keyboard station).
Project Author(s)
Noah Pettit; Matthias Minderer; Selmaan Chettih; Charlotte Arlt; Jim Bohnslav; Pavel Gorelick; Ofer Mazor; Christopher Harvey
Project Links
https://github.com/HarveyLab/mouseVR
This post was automatically generated by Noah Pettit