An Open-source Anthropomorphic Robot Hand System: HRI Hand
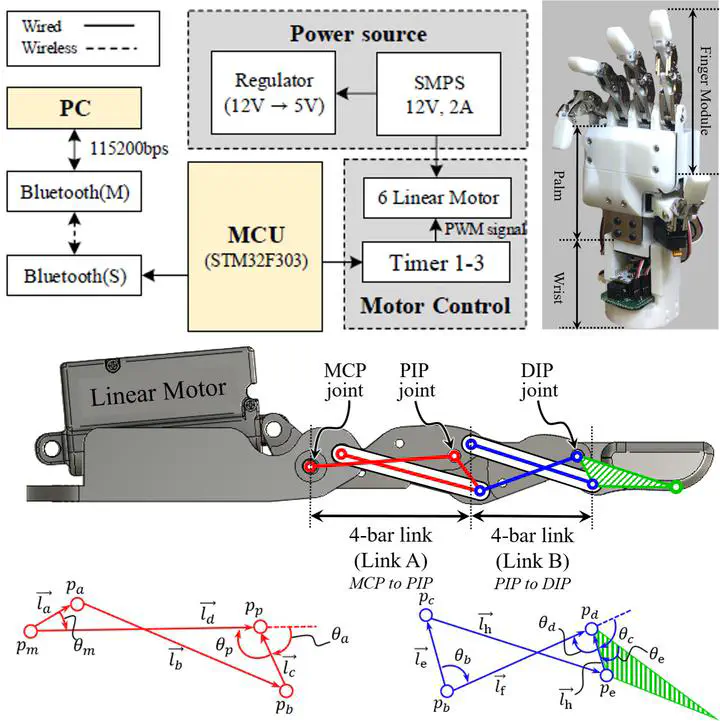
Temos aqui um recurso aberto que consiste de um sistema de mão robótica antropomórfica chamado “HRI Hand”. Nosso sistema de mão robótica foi desenvolvido com o objetivo de desempenhar a função de efetor final do manipulador robótico colaborativo. Esta plataforma de pesquisa pode ser construída a um preço muito mais baixo (aproximadamente US$ 500, usando apenas impressão 3D) quando comparada aos disponiveis no mercado. Além disso, ela foi projetada como um mecanismo no qual existe a ligação de duas barras de quatro efetores para o mecanismo subatuado, e fornece movimento de pré-modelagem semelhante ao da mão humana, antes de tocar em um objeto. Um URDF, um node de Python e um pacote rviz também são fornecidos para dar suporte ao Sistema Operacional do Robo - Robot Operating System (ROS). Todos os arquivos CAD de hardware e códigos-fonte de software foram liberados e podem ser facilmente montados e modificados. O sistema proposto neste artigo foi desenvolvido com uma estrutura de cinco dedos, mas cada dedo é modularizado, de modo que pode ser desenvolvido com efetores finais de vários formatos, dependendo do formato da palma da mão.
Autor(es)
Hyeonjun Park; Donghan Kim
Links
https://github.com/MrLacuqer/HRI-hand-firmware.git
Video
Esse post foi criado automaticamente por Andre M Chagas e traduzido por Stephen Keller